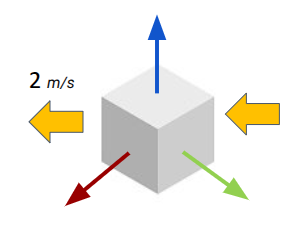
¶ Accelerometers
An accelerometer is a sensor that measures the specific force (or the rate of velocity change). The specific force represents all inertial accelerations, including changes of velocity in the local coordinate frame, and reaction to gravity.
Its output is typically expressed in m/s².
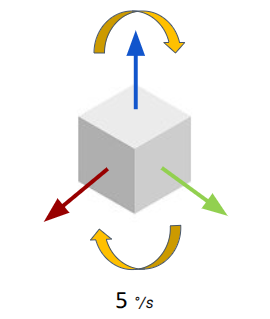
¶ Gyroscopes
A gyroscope is a sensor that measures the rotation rate with respect to an inertial frame.
It will thus measure all the subsequent changes in orientation when it’s rotated.
Since the Earth coordinate frame is rotating, a gyroscope lying on the ground will also measure the Earth rotation rate (approximately 15°/h).
Gyroscope output is typically expressed in °/s, or in rad/s.
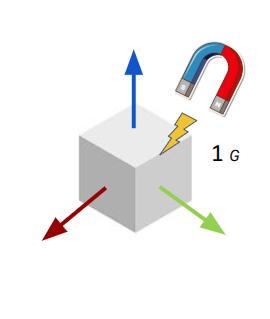
¶ Magnetometers
Magnetic sensors are used to measure the Earth magnetic field. These sensors enable a compassing capability by providing direction to the magnetic North.
Usually magnetic field is expressed in nano Teslas or Gauss. However, compass applications do not really require specific units since only the direction of magnetic field matters. Thus, a normalized vector (with a norm equal to 1.0) can perfectly describe the direction to Magnetic North.
¶ Sensor Fusion
Sensor fusion is the process of combining data from multiple sensors to produce more accurate, reliable, and comprehensive information than could be obtained from any single sensor alone. By integrating inputs from sensors such as accelerometers, gyroscopes, magnetometers, and sometimes even cameras or GPS, sensor fusion algorithms can filter out noise, reduce uncertainty, and estimate variables like position, orientation, or velocity with higher precision. This technique is widely used in robotics, autonomous vehicles, smartphones, and wearable devices to enhance navigation, motion tracking, and situational awareness. Sensor fusion often leverages advanced algorithms like Kalman filters, complementary filters, or neural networks to intelligently merge and interpret sensor data in real time.
We lead the way in robotics innovation through cutting-edge technologies like olixAI™. This embedded AI system is designed to enhance the intelligence and autonomy of mobile robots and industrial systems, enabling smarter, faster, and more accurate robotic applications across industries. It integrates inside our most advanced IMU sensor, olixSense™, and provides advanced sensor data in real time.
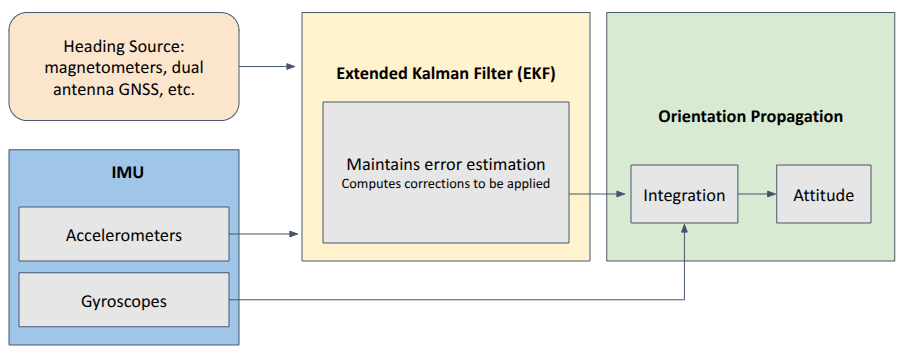
¶ Attitude & Heading Reference System (AHRS)
An Attitude and Heading Reference System (AHRS) is a sensor assembly that pairs an IMU with an additional sensor—commonly a magnetometer—to determine heading. It uses gravity as a vertical reference to stabilize the IMU, merging data from the gyroscopes with the accelerometer’s gravity readings in a Kalman filter to calculate roll and pitch. For heading, an auxiliary sensor such as a magnetometer or a dual-antenna GNSS is used. While an AHRS can provide precise roll, pitch, and yaw data under low to moderate dynamic conditions and is straightforward to set up and operate, its overall accuracy might be compromised in highly dynamic environments or areas with significant magnetic disturbances.
¶ Inertial Navigation System (INS)
An Inertial Navigation System (INS) is a device that relies on a triad of gyroscopes and accelerometers to compute a 6 degrees of freedom navigation output (orientation, velocity and position).
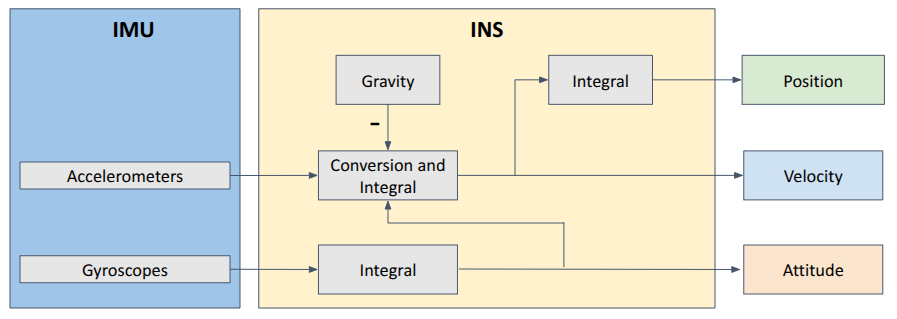
The INS is highly efficient for short term navigation. As the sensors are integrated over time, there is a residual error that tends to increase. Therefore, corrections must be regularly applied on the INS outputs to keep reasonable errors.