¶ olixSonar
¶ Overview
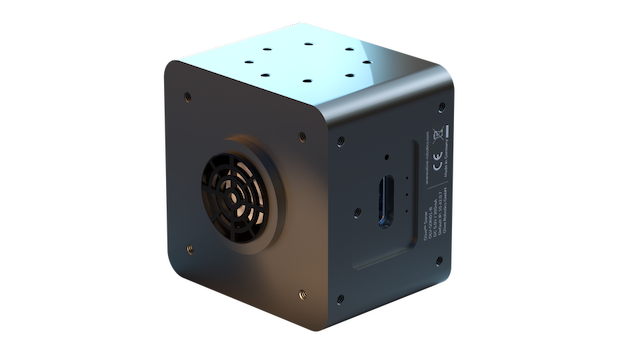
The olive® ultrasonic module is a compact and versatile sensor that provides high-resolution distance measurements for robotic systems. It features a high-frequency ultrasonic transceiver and a built-in transducer that provides accurate and reliable distance measurements even in challenging environments.
¶ Key Features
Some of the key features and benefits of our ultrasonic module include:
- High-resolution distance measurements: The ultrasonic module features a high-frequency ultrasonic transceiver and a built-in transducer that provide accurate and reliable distance measurements even in challenging environments. This makes it an ideal component for applications that require high-resolution distance information, such as collision avoidance, object detection, and object avoidance.
- Compact and lightweight design: The ultrasonic module has a compact and lightweight design that makes it easy to integrate into a wide range of robotic systems. Its small size and low weight make it ideal for applications where space and weight are at a premium, such as in aerial, underwater, or mobile robots.
- Native ROS support: Our ultrasonic module comes with native ROS1 and ROS2 communication support, so you can easily connect it to your host computer and access its distance data with our ROS software packages and examples. This allows you to use the distance data from the ultrasonic module to control and navigate your robotic systems in real-time.
Overall, our ultrasonic module is a compact and versatile sensor that provides high-resolution distance measurements for robotic systems. Its high-resolution distance measurements, compact and lightweight design, and native ROS support make it an essential component for developing autonomous and intelligent robotic systems.
¶ General Technical
| Part Number | OLV-SON01 |
|---|---|
| Connection Interface | USB Type-C |
| Communication Protocol | ROS 1&2 (Virtual Ethernet / IPV4) |
| Communication | USB Type C - Ethernet Over USB |
| Sample rate | 10 Hz |
| Weight | 62 grams |
| Dimensions WxHxD | 40x40x30 mm |
| Native ROS Messages | sensor_msgs/Range |
| Operating Voltage | 3.0-5.5VDC |
| Operating Current | ~300 mA |
| Operating Temperature | 0 ~ 55 °C |
¶ Sensor Specifications
| Part Number | OLV-SON01 |
|---|---|
| Range Min. | 0,25 m |
| Range Max. | 7,5 m |
| Resolution (theoretical) | 1 mm |
| Detection Accuracy | ±2 % |
| Field of View | ±20 deg |
| Internal Frequency | 40 kHz |
¶ Setup
- Follow the Quick Start Guide for Olive Robotics robot modules to connect the device and start using it.
- When the olive® Ultrasonic sensor is correctly connected to your system, you can check that the expected ROS topics are present. On your host PC, run
ros2 topic list. The following ROS topics should be shown:/olive/sonar/id01/range/parameter_events/rosout
INFO
The value id01 is your device's default namespace.
- Change parameters such as IP and ROS topic name using the embedded web interface. Open your browser on your host computer and enter the device IP address. If you did not change the default IP address, use
192.168.7.100.
¶ ROS Topics
| Topic Name | Message Type | Type | Description |
|---|---|---|---|
| /range | sensor_msgs/Range | Publisher | The currently measured range. |
¶ Advanced Settings
The device allows certain parameters to be changed at runtime. To get an overview of all changeable parameters use ros2 param list. To change a parameter use ros2 param set /dcm_son <parameter> <new_value>. These are the supported ROS parameters.
| Parameter | Type | Range Min | Range Max | Default | Description |
|---|---|---|---|---|---|
| frequency | int | 0 | 10 | 10 | Status publish rate |