¶ 1 Getting to Know the ANT1
¶ 1.1 Package Includes

|
|

|
The robot package includes the robot main body, a wireless joystick controller, and a dedicated charging unit.
The robot main body is fully assembled and ready for operation. The joystick controller is used for manual control and basic operation. The charging unit is used to safely charge the robot battery.
¶ 1.2 Hardware Overview
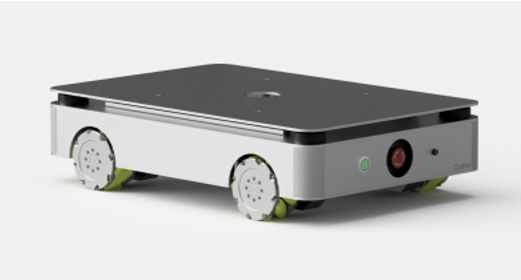
The robot hardware system consists of the main robot platform, multiple LiDAR sensors for environment perception, an integrated embedded compute processor, and an onboard battery system.
This powerful hardware foundation enables stable execution of computationally intensive tasks, including real-time SLAM, multi-sensor data fusion, motion control, and autonomous navigation. The system is designed to maintain consistent performance and reliability during long-term operation.
¶ LiDAR
To achieve accurate environment perception, LiDAR sensors are integrated into the ANT1 robot platform.
The LiDAR sensors continuously scan the surrounding environment and generate high-resolution distance data. This data enables the robot to detect obstacles, build environment maps, and support autonomous navigation. By providing precise and reliable spatial information, the LiDAR system plays a critical role in ensuring safe and stable robot operation.
.png)
¶ WiFi Communication Module
For enhanced connectivity, the ANT1 robot supports optional wireless communication modules.
Olive Robotics offers the olixLink C1 WiFi module, providing stable wireless networking for remote operation, cloud connectivity, and real-time data exchange.

¶ Embedded Computer
The onboard computer serves as the main computing core of the robot and is responsible for processing all system-level computations.
It handles sensor data processing, localization, mapping, navigation, and high-level control tasks.
The onboard computer also provides a wide range of hardware interfaces, enabling connection to external devices, sensors, and network infrastructure.
 |
 |
| Embedded Computer | |
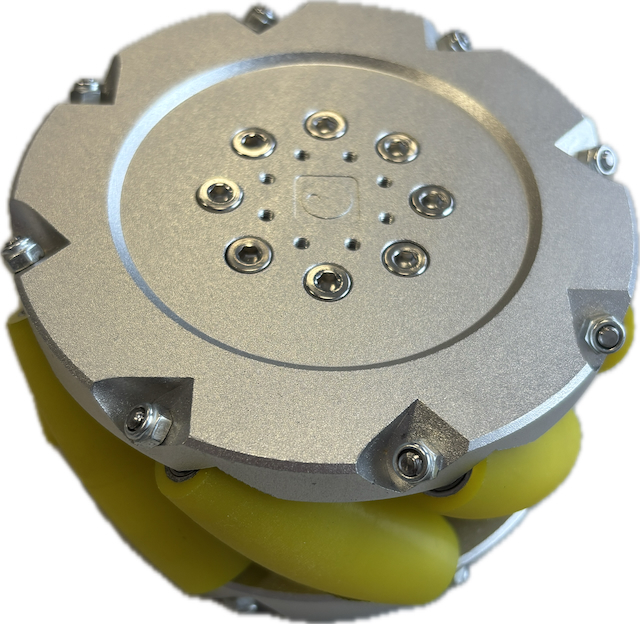
¶ Mecanum Wheels
The ANT1 robot uses custom-engineered mecanum wheels that are fully integrated into the mechanical structure of the robot.
This design improves structural stability while enabling accurate omnidirectional motion control, allowing the robot to perform precise positioning and smooth trajectory tracking.