¶ Getting To Know the olixBot™ Scara 1
¶ Package Includes
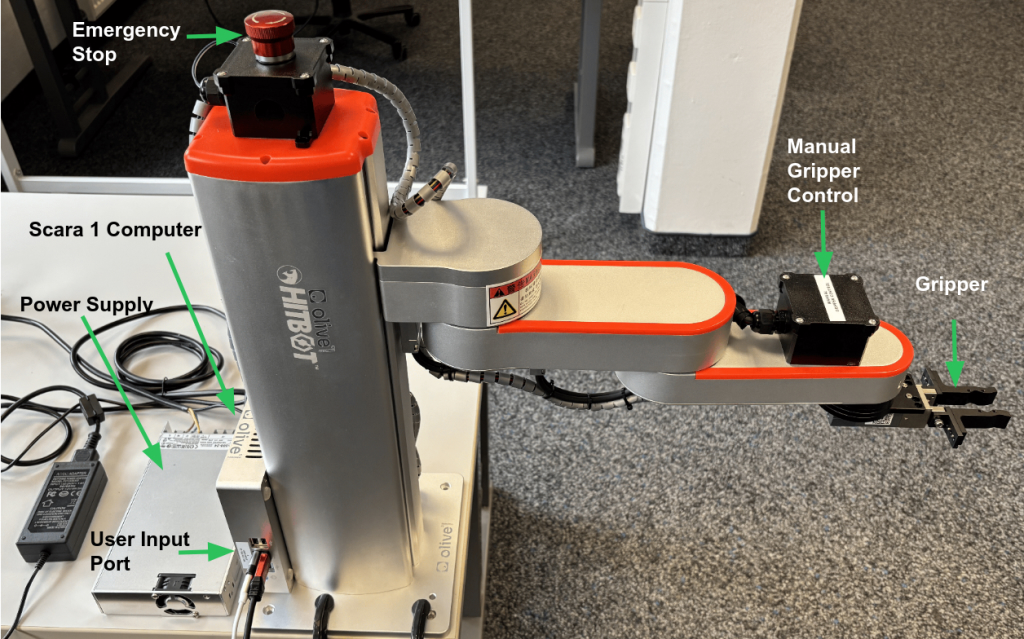
The package includes a robotic arm base unit equipped with two rotational joints for motion in the X–Y plane and a linear actuator along the Z-axis for vertical movement. An end-effector gripper is mounted at the tip of the arm for grasping objects. The system also comes with a power supply and the necessary connection cables.
¶ Hardware Overview
This robotic arm system is designed for basic manipulation and automation tasks. The arm features two rotational joints operating in the X–Y plane, enabling planar movement across the workspace. A linear actuator along the Z-axisprovides vertical motion for lifting and lowering objects.
At the end of the arm, a gripper end-effector is installed for grasping and handling objects. This configuration enables simple pick-and-place operations and provides a compact platform for robotics experimentation, education, and automation applications.