Appearance
Core Concepts
This section contains a background of concepts that are common across all of Olive’s hardware and software products. As much as possible, the information here is presented in a general form while more hardware-specific or language-specific details are provided, respectively, in the Hardware and Apps and ROS PKGs sections.
What is Olive One?
Olive One is a brand of Smart Interoperable Components developed by Olive Robotics GmbH for use in any robotic system.
- All-in-one module with a variety of elements required to drive a robot without other devices. All you need is a host PC with a USB C port and ROS communication to operate a robot.
- We offer various source codes and tools to help first-timers with Olive to operate a robot within a day.
- Olive is compatible with any system or host controller. All you need is a ROS2 framework and communication to operate a robot made with Olive modules.

The modules also can be daisy chain and connect to each other:

Modules
We develop a series of different modules, ranging from IMU sensors and cameras to smart actuators. Below you can find different modules with a short description of their functionality.
| Module Name | Function | Model Numbers | Image |
|---|---|---|---|
| olive® IMU | Low-latency inertial measurement unit with native ROS communication | OLV-IMU01-21DR OLV-IMU01-10DS OLV-IMU01-9DB |  |
| olive® Camera | Ultra-compact AI camera with native ROS communication | OLV-SRV01-B OLV-SRV01-S OLV-SRV01-TP |  |
| olive® Servo | Smartest servo actuator ever built with real-time feedback | OLV-SRV01-B16/32/48/64 OLV-SRV01-S16/32/48/64 |  |
| olive® Hub (coming soon) | Multi-Module HUB with power management and hardware synchronizer |  | |
| olive® Power Pack (coming soon) | Smart battery unit with current, temperature, and voltage feedback |  |
Olive Rosella modules are Ethernet-enabled devices that serve as building blocks for a robot or automated system. These modules include sensors, actuators, and peripheral units to provide environmental sensing and physical motion and devices to interface with other modules. Modules run firmware that allows them to communicate over a standard Ethernet connection over the USB connection. Aspects of the firmware that are common to all modules are documented below, while aspects that are module-specific are covered in the Hardware section.
Communication
Modules are connected to host computers via standard USB Type C and standard commercially available HUB equipment with PD support. In the host computer network, every client needs to obtain an IP address in order to communicate with the main PC or with other connected modules. If there is only one module connected to the main PC, the module will get an IP address automatically from the host PC. If more than one module is connected to the computer and user wants to establish a network along all the modules, the bridge connection must be established in the main PC.
There are three ways to setup the IP address on the host computer:
- Dynamic Address Assignment (DHCP)
- Static Address Assignment
- Bridge Connections to Multiple Modules
| Summary / Description | Diagram |
|---|---|
| Single Module - Network w/ DHCP or Static IP The module stablished the standard wired network over a single USB port that is connected to the development host computer. This is probably the most straightforward setup. | 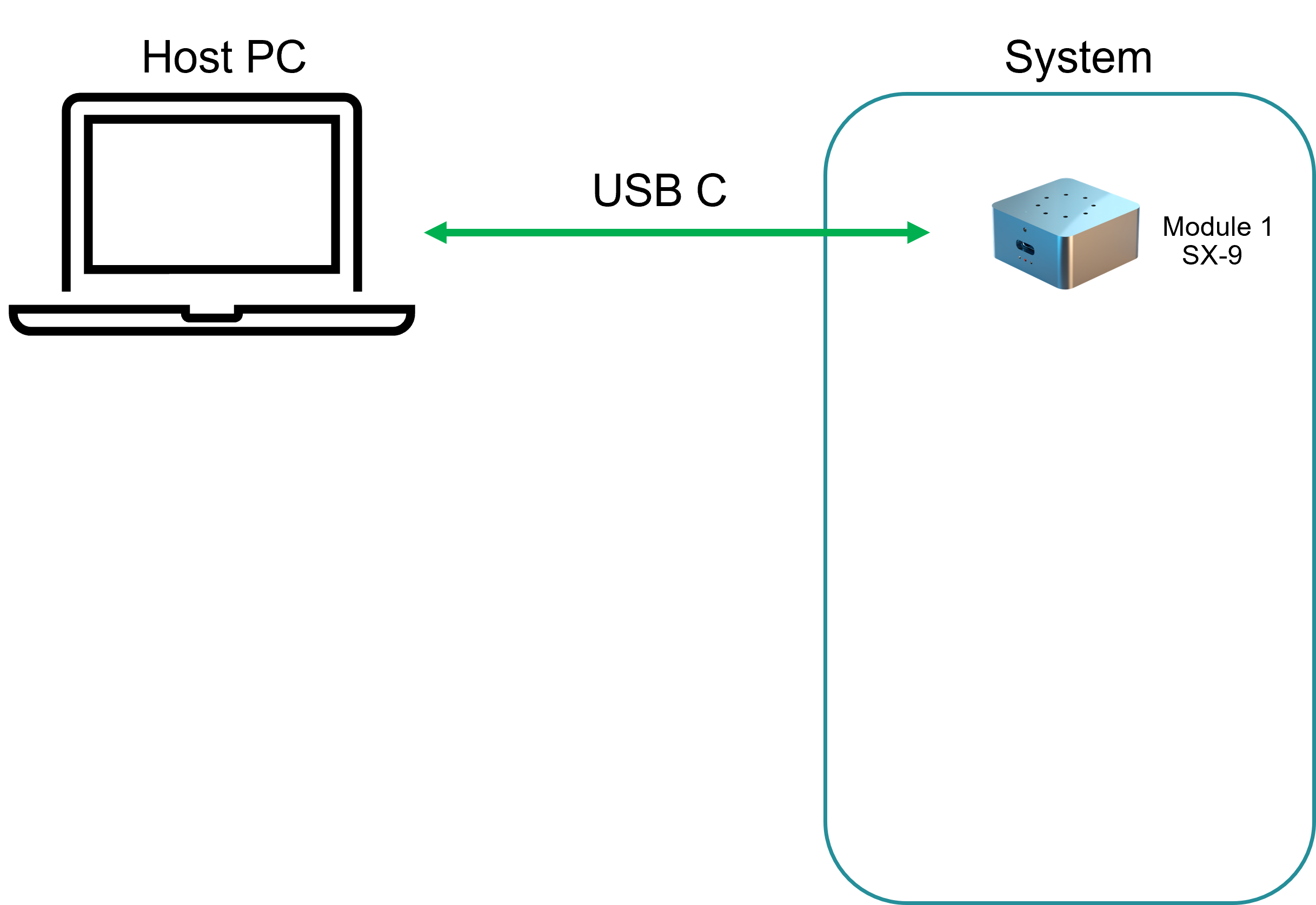 |
| Multiple Actuator Robot - Network w/ Bridge The robot actuator modules are on a network with their own internal daisy chain connection, and they connect to the development host computer using the last USB interface from the module's network. The connections on the host computer must be configured as a bridge network in order to enable all the modules to be in the same subnet. | 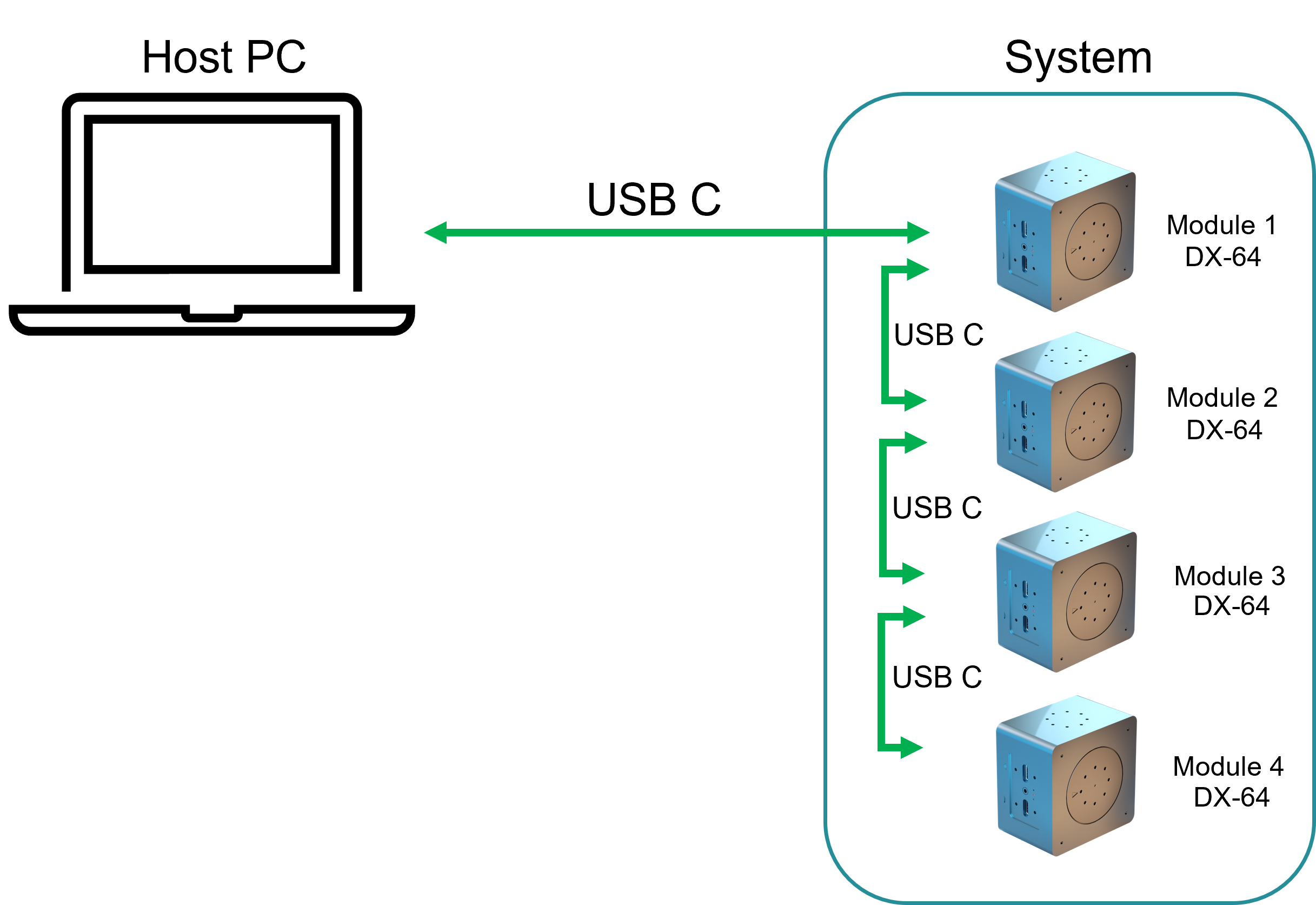 |
| Multiple Actuator and Sensor Robot - Network w/ Bridge The robot actuator modules, along with the last sensor, are on a network with their own internal daisy chain connection, and they connect to the development host computer using the last USB interface from the module's network. The connections on the host computer must be configured as a bridge network in order to enable all the modules to be in the same subnet. | 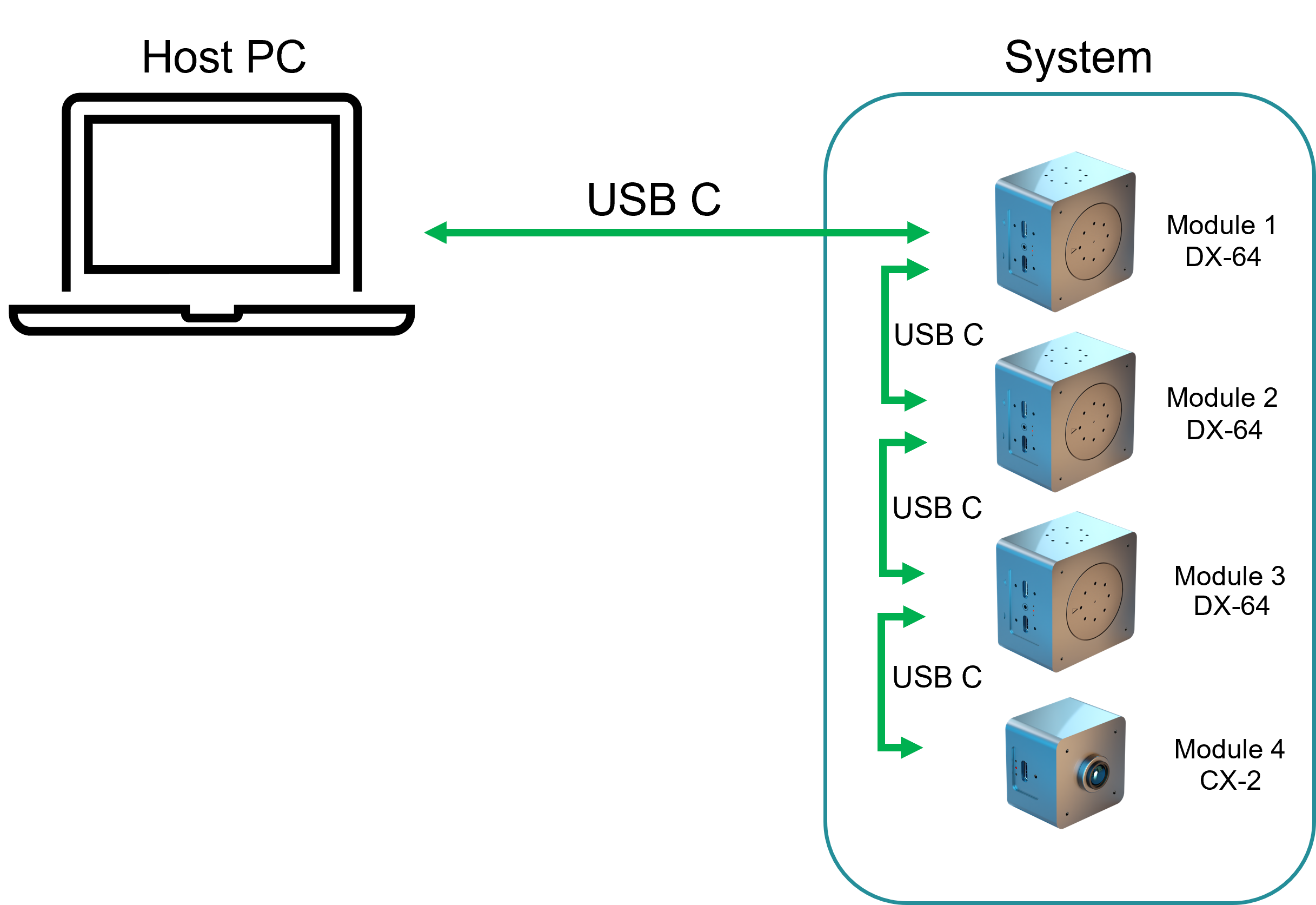 |
| Multiple Actuator and Sensor Robot - Hub | 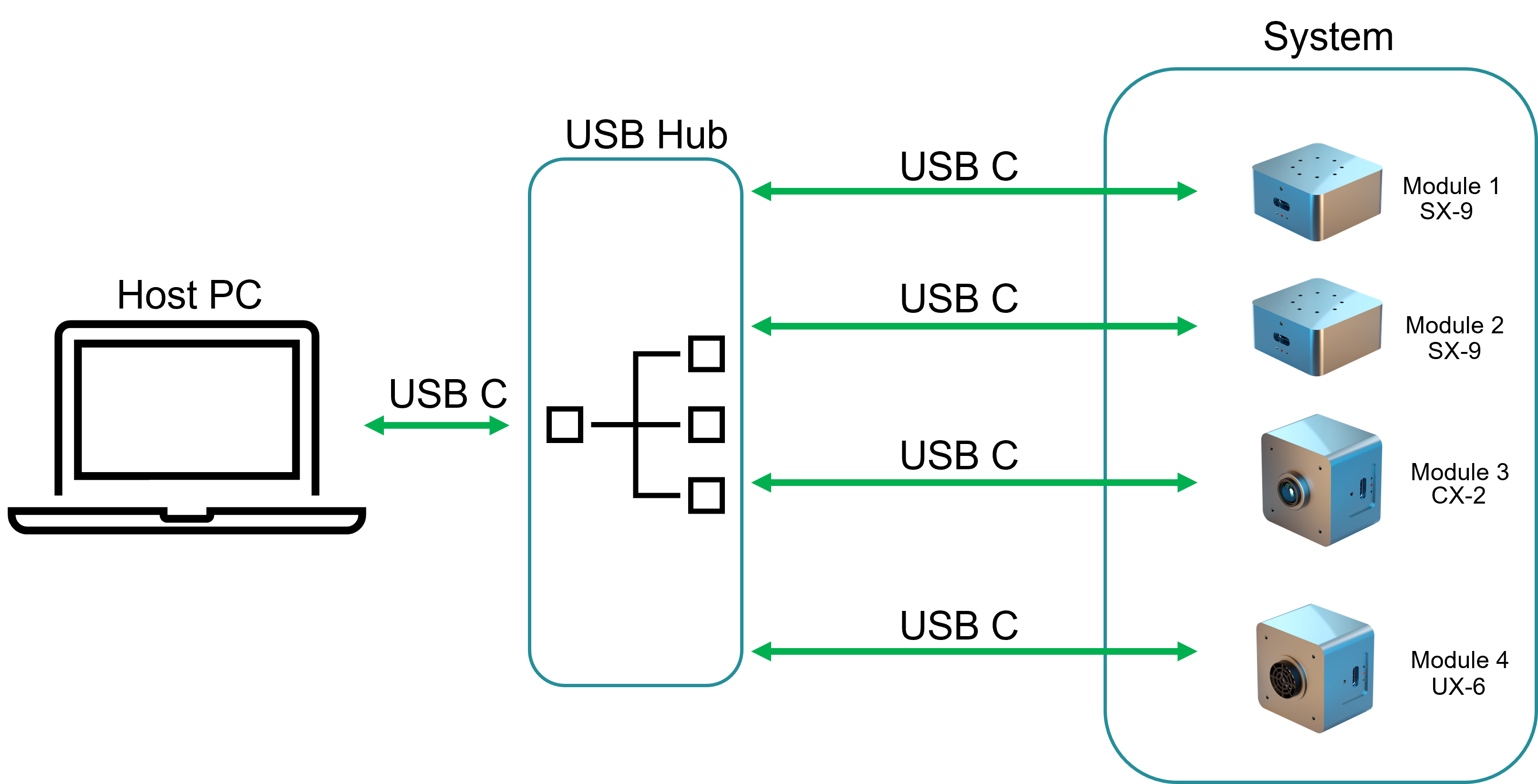 |